

“Omron杯”Sysmac自动化控制应用设计大赛
初赛要求细则
一、HMI界面
1.操作界面

符号说明:
① Servo_Lock——伺服使能按键;用于机械手臂的轴使能;
② Home_Set ——初始位置预置按键; 用于设置机械手旋转轴的原点 (即主动臂处于水平位置,此状态为机械手初始位置);
③ Home——回初始位置按键;用于机械手臂回到初始位置的动作;
④ Defend——守门按键;用于机械手臂的守门使能动作;
⑤ Reset ——清错按键;用于清除所有报警错误(可包括数据初始化);
⑥ Left_Break和Right_Break——左/右抱闸按键;用于抱紧或松开机械手伺服电机的抱闸;
⑦ Left Angle和Left Angle ——机械手旋转轴当前角度显示;
⑧ Jog——点动按键;用于控制机械手臂的上、下、左、右动作;
⑨ Factor——仿真机械手比例大小;用于显示左上角仿真机械手的比例;
⑩ Speed——速度输入;用于速度输入(用于手动点动/自动防守);
⑪ Acc——加减速输入;用于加减速度输入(用于手动点动/自动防守);
⑫ Jerk ——跃度输入;用于加加速速度输入(用于手动点动/自动防守);
⑬ Calculate_Start——运算开始按钮;用于机器人正反解的运算按钮;
⑭ X和Y——实际位置显示;用于机器人移动端实际空间的位置显示;
2. 参数界面
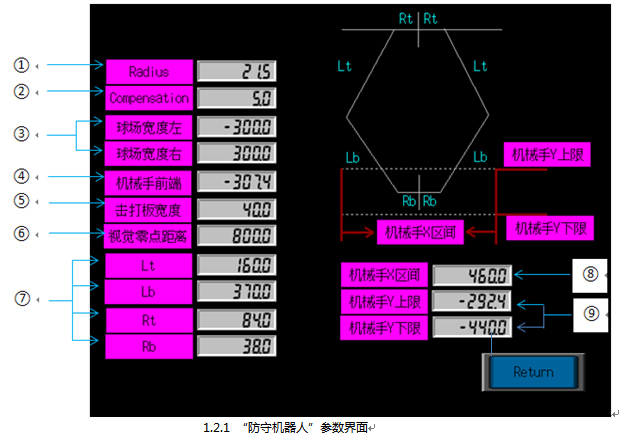

 符号说明:
符号说明:① Radius——球半径输入;用于输入小球的半径,单位:mm;
② Compensation——偏移量输入;守门X方向的偏移量(如有需要可增加Y方向偏移量),单位:mm;
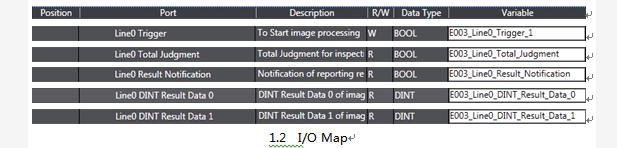
③ 球场宽度左/右——输入比赛球场的宽度(如图:1.2.4所示),单位:mm;
④ 机械手前端——显示机械手移动端的Y轴方向坐标 (如图: 1.2.2所示),在机械手水平校准和回原点之后,通过正解可得机械手前端的坐标位置,单位: mm;
⑤ 击打板宽度——输入击打板的宽度,单位:mm;
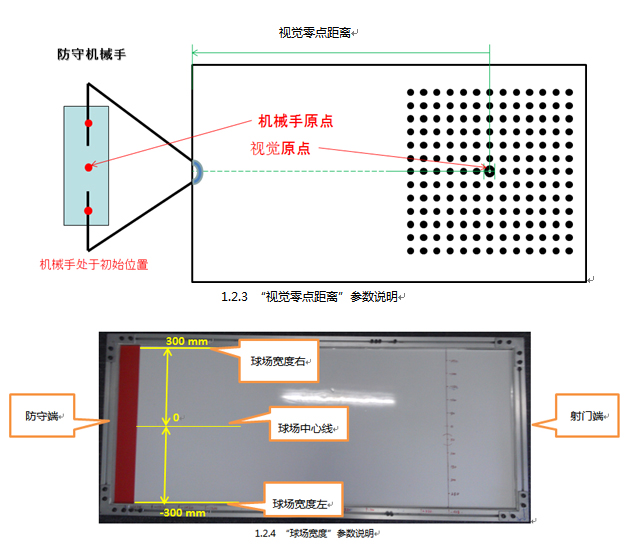
⑥ 视觉零点距离——输入视觉校准之后的零点位置与校准板边沿的距离(如图:1.2.3所示),单位:mm;
⑦ Lt/Lb/Rt/Rb——输入机械手臂的结构参数,单位:mm;
⑧ 机械手X区间——输入机械手X轴方向上的活动范围,单位:mm;
⑨ 机械手Y上下限——输入机械手Y轴方向上的最高上限活动范围和最低下限活动范围,单位:mm;
二、NJ与FH数据交换
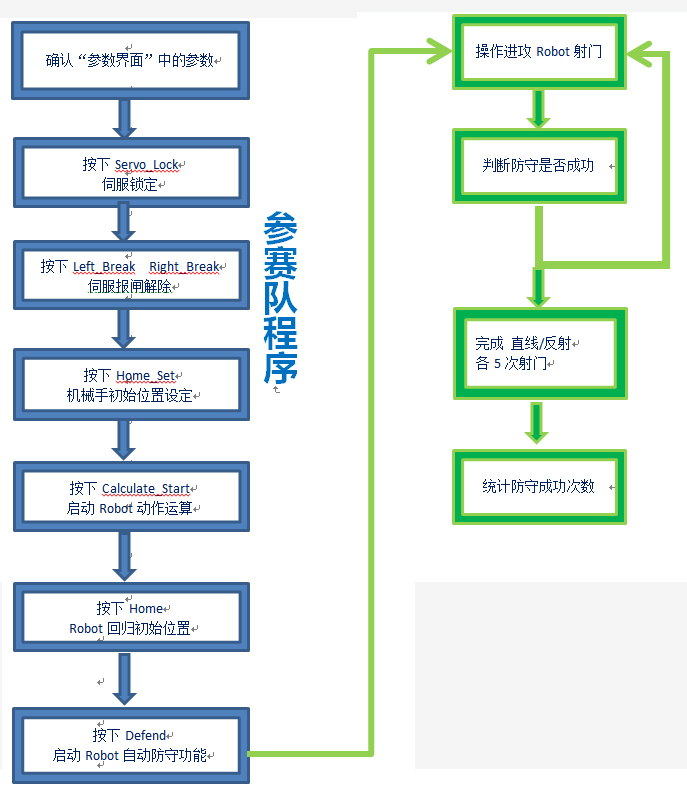
1.NJ与FH通信地址在I/O Map创建5个全局变量,如下图:
全局变量说明:
①E003_Line0_Trigger_1:拍摄触发信号;
② E003_Line0_Total_Judgment:拍摄结果OK/NG 判断信号,当FH检测为NG时为TRUE,当FH检测为OK时为FALSE;
③ E003_Line0_Result_Notification: 坐标数据传输完成信号,当FH拍完照传输给NJ数据后为TRUE(建议参考样例程序使用下降延触发);
④ E003_Line0_DINT_Result_Data0\Data1:为FH给NJ的坐标数据通道,Data0定义为NJ的X轴,Data1定义为NJ的Y轴;

三、预赛程序测评操作步骤
说明:
① 预赛中主办方的发球方式:直球和反弹球各5次,以防守成功率作为主要评分依据;
② 硬件参数(球半径、球场宽度、机器人Lt/Lb/Rt/Rt等在培训资料中已有说明)可参照“HMI界面”截图中的参数进行默认设置;
③ 注意:由于FH控制器内可能保留着无效的原始坐标数据,因而在启动防守的时候,FH控制器发送给NJ的第一个组坐标数据,建议不采用;
④ 本次大赛会发送给参赛各校一个PLC的框架程序,该框架已经将“CPU机架、I/O配置、Ethercat组网”进行了程序规范,参赛各校必须在该框架程序下进行PLC编程;同时HMI的范例程序也会发给大家;
|