

控制对象说明
1、被控对象:
所选被控对象为两自由度并联机械手,两自由度并联机械手具有平稳,准确,快速等优点,在食品加工,包装,物流等各行业使用非常广泛,因此选用该装置作为本次比赛地被控对象,可以很好地体现NJ的高速高精度特点。该装置由两个伺服电机安装在静平台上,带动主动臂动作,主动臂连接从动臂动作,从而控制动平动盘的移动,如图1:

图1 被控对象: 两自由度并联机械手机构说明

图2机构说明图
2、机械保护

3、NJ输出
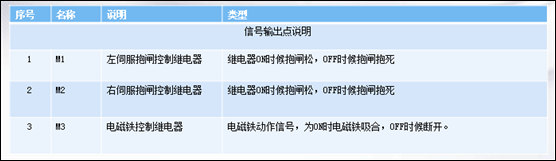
4、系统配置

图3 系统配置
注:所有配置均为必要选项
5、主要配置器件

